Framework of MoMa-Pos
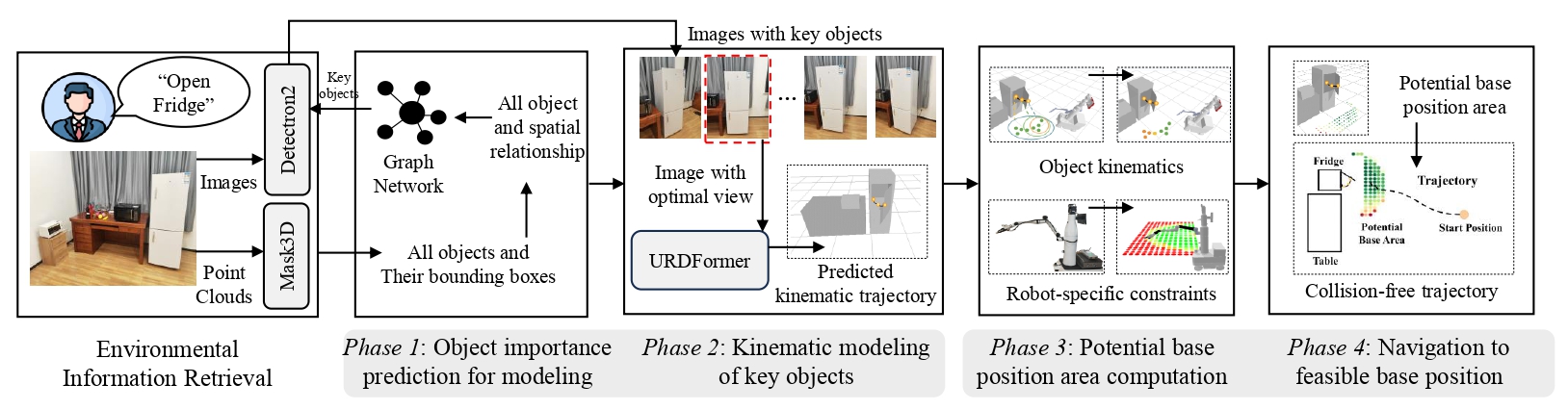
MoMa-Pos consists of four phases, including object importance prediction for kinematic modeling,kinematic modeling of key objects, base placement optimization, and navigation to feasible base placement.
⁎ In the first phase, key objects in the scene are prioritized to enable efficient kinematic modeling without processing every object.
⁎ In the second phase, kinematic modeling is conducted for these prioritized objects, supporting the subsequent object-kinematic-aware base placement optimization.
⁎ In the third phase, potential base placement areas are identified by considering both robot-specific constraints and environmental kinematics.
⁎ In the last phase, the robot navigates to the optimal position, ensuring physical feasibility and adaptability for task execution
⁎ In the first phase, key objects in the scene are prioritized to enable efficient kinematic modeling without processing every object.
⁎ In the second phase, kinematic modeling is conducted for these prioritized objects, supporting the subsequent object-kinematic-aware base placement optimization.
⁎ In the third phase, potential base placement areas are identified by considering both robot-specific constraints and environmental kinematics.
⁎ In the last phase, the robot navigates to the optimal position, ensuring physical feasibility and adaptability for task execution